Zhixiang Liu
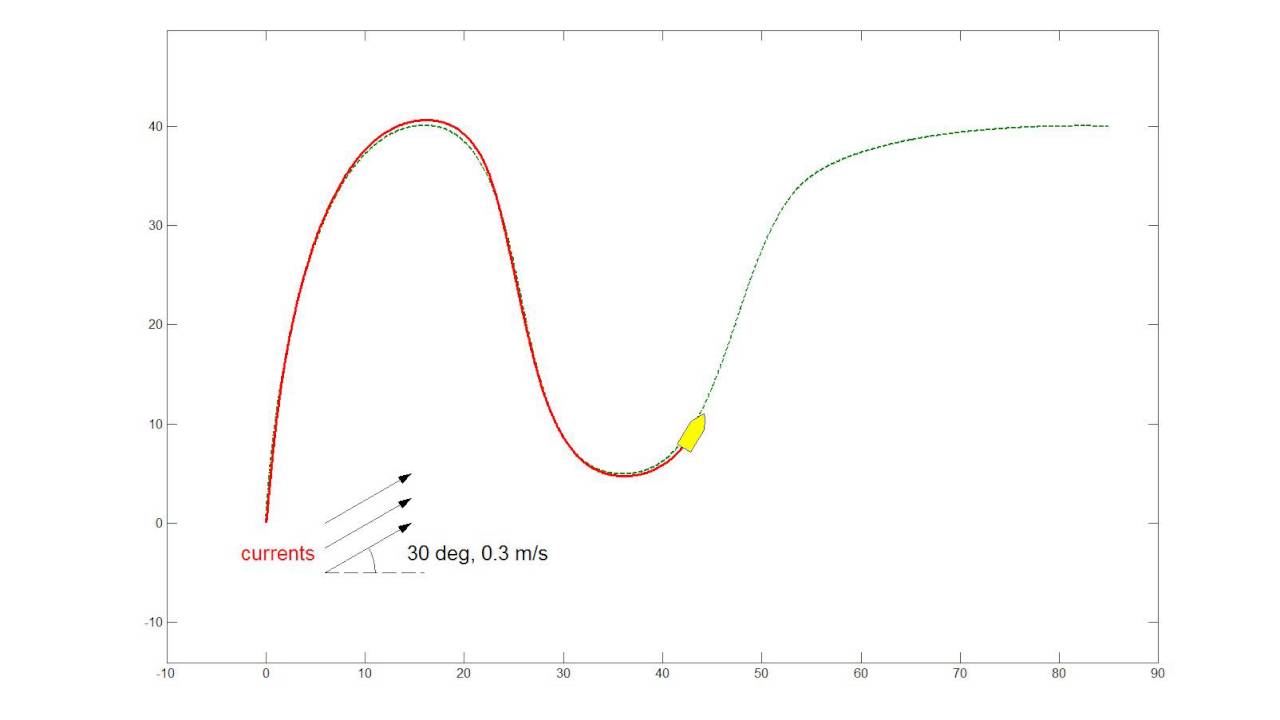
Adaptive observer is used for estimating the disturbance and steering caused sideslip angle, then a proportional-integral (PI) kind of line-of-sight (LOS) path following scheme is designed based on the estimated sideslip angle.
Source
Adaptive observer based line-of-sight (LOS) path following
Hi, Can you please send me equations and MATLAB program for this algorithm? What if we add some disturbance to this?