Aleksandar Haber PhD
#controltheory #mechatronics #systemidentification #machinelearning #datascience #recurrentneuralnetworks #signalprocessing #dynamics #mechanics #mechanicalengineering #controltheory #mechatronics #robotics #astrodynamics #astrophysics #physics #chaos #mathematics #mathematicians#electricalengineering #mechanicalengineering #engineering #leastsquares #nonlinearsystems #modelpredictivecontrol #optimalcontrol #controlengineering #controltheory #optimalcontrol #modelpredictivecontrol #robotics #reinforcementlearning #automation #industrialautomation #processcontrol #systemidentification #machinelearning #python #optimization #datascience #timeseries #automation #robotics #mechatronics #gnc #nonlinear #mathematics #signalprocessing #processengineering #processautomation #observability #controllability #estimation #linearsystems #advancedcontrol
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
– Buy me a Coffee: https://www.buymeacoffee.com/AleksandarHaber
– PayPal: https://www.paypal.me/AleksandarHaber
– Patreon: https://www.patreon.com/user?u=32080176&fan_landing=true
– You Can also press the Thanks YouTube Dollar button
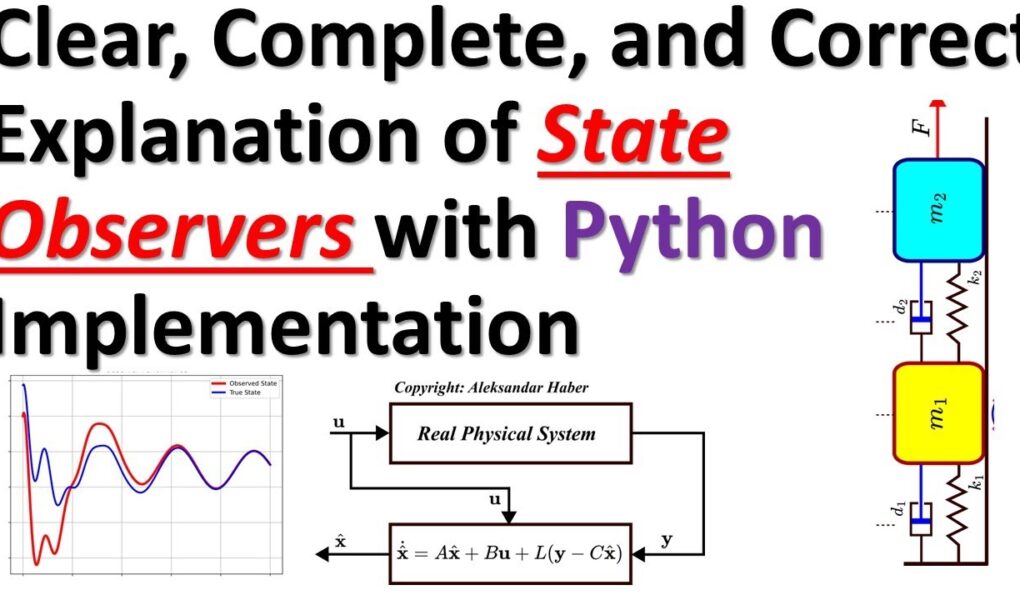
In this control engineering and control theory tutorial, we provide a correct and detailed explanation of state observers that are used for state estimation of state-space models. We explain how to implement and simulate observers in Python. The main motivation for creating this video tutorial comes from the fact that in a number of control engineering books and online tutorials, observers are presented from the mathematical perspective without providing enough practical insights and intuitive explanations of observers and state estimators. In contrast, in this control engineering tutorial, we provide an intuitive explanation of observers as well as a concise mathematical explanation.
The observer developed in this tutorial belongs to the class of Luenberger Observers. We use the pole placement method to design the observer gain matrix. We design, implement, and simulate the observer in Python by using Control Systems Library and the function place().
Source



The Python script developed in this tutorial is given here (a small fee is required to support this channel):
https://ko-fi.com/s/2ab21d3ad4
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
– Buy me a Coffee: https://www.buymeacoffee.com/AleksandarHaber
– PayPal: https://www.paypal.me/AleksandarHaber
– Patreon: https://www.patreon.com/user?u=32080176&fan_landing=true
– You Can also press the Thanks YouTube Dollar button
Suggestion: Data Enabled Predictive Control (DeePC) (Basically a MPC without a model purely relying on past measured data) from scratch would be a blast.
Thank you for your videos. They are always very nice!