PetarKormushev
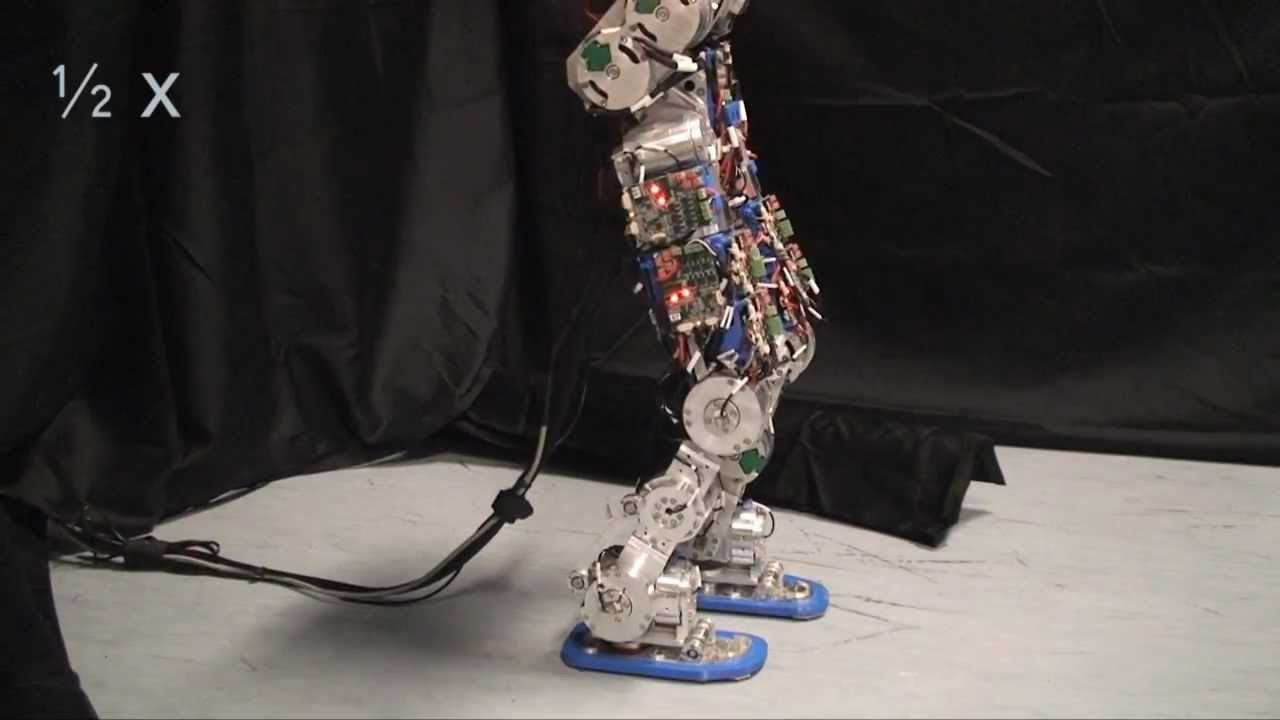
The compliant humanoid robot COMAN learns to walk with two different gaits: one with fixed height of the center of mass, and one with varying height. The varying-height center-of-mass trajectory was learned by reinforcement learning in order to minimize the electric energy consumption during walking. The optimized walking gait achieves 18% reduction of the energy consumption in the sagittal plane, due to the passive compliance – the springs in the knees and ankles of the robot are able to store and release energy efficiently. In addition, the varying-height walking looks more natural and smooth than the conventional fixed-height walking.
This research was presented at the International Conference on Intelligent Robots and Systems (IROS 2011) in September 25-30, 2011 in San Francisco, California.
Video credits:
————————–
Dr. Petar Kormushev
http://kormushev.com
Dr. Barkan Ugurlu
Dr. Nikos Tsagarakis
Affiliation:
————————-
Department of Advanced Robotics
Italian Institute of Technology
Publication:
———————————
Kormushev, P., Ugurlu, B., Calinon, S., Tsagarakis, N., and Caldwell, D.G., “Bipedal Walking Energy Minimization by Reinforcement Learning with Evolving Policy Parameterization”, In Proc. IEEE/RSJ Intl Conf. on Intelligent Robots and Systems (IROS-2011), San Francisco, 2011.
http://kormushev.com/research/publications/
Paper title:
————————–
Bipedal Walking Energy Minimization by Reinforcement Learning with Evolving Policy Parameterization
Authors:
———————————
Petar Kormushev, Barkan Ugurlu, Sylvain Calinon, Nikolaos G. Tsagarakis, Darwin G. Caldwell
Paper abstract:
————————–
We present a learning-based approach for minimizing the electric energy consumption during walking of a passively-compliant bipedal robot. The energy consumption is reduced by learning a varying-height center-of-mass trajectory which uses efficiently the robot’s passive compliance. To do this, we propose a reinforcement learning method which evolves the policy parameterization dynamically during the learning process and thus manages to find better policies faster than by using fixed parameterization. The method is first tested on a function approximation task, and then applied to the humanoid robot COMAN where it achieves significant energy reduction.
Other videos:
————————————-
http://kormushev.com/research/videos/
.
Source


idzie tak jakby mu się siku chciało
After you teach them to walk, they won't be compliant any more.
Instead, they'll be Hostile hUMANoid robots, or HUMANs.
this is suck to petman (boston dinamics)
asimo walked much better than this 13 years ago!
walks like a 90 year old man lol
I am interested in talking with the creators about the possibility of helping my daughter Lizzie who is not able to walk due to an undiagnosed rare condition that affects her balance. She is unable to balance enough to walk. She can stand for short periods of time but usually moves around the house in a crawling position.
Lizzie is thirteen and we (as parents) are concerned about her future and see these developments as promise that she may one day with some sort of mechanical assistance, be able to balance enough to walk. Any advice or assistance would be greatly appreciated.
Very good.
I was hoping to see something absolutely original regarding it's joints.
Ankle and hips joints are similar to german humanoid DLR TORO robot.
But I'm glad to see more people making more kinds of robots.
why don't try it from a biological point of view? a hard limb part, a bone, and artificial muscles or artificial tendons? walking will never be realistic with motors and servos because they are not like human joints, which are really flexible 3-axis. i understand you can make a believable movement with these, which satisfy most needs, but basically you want to simulate a biological movement/animation. therefore i think approaching it with the same devices (biologically plausible looking, functioning limbs, body parts) would provide (maybe) an easier point of view to solve problems. its like two mathematical models. in the first you can "explain" something with a bunch of operations with 3 lines of formula, but switching to another model would yield a 1,5 line formula for the same.
Impressive! It took my grandpa 90 years to learn how to walk "efficiently"
have you seen somebody walk like this?? how many dollars to have this result ???
Don’t want to sound cocky and everything but heck he looks cute at first 😂
i have a sugestion to help improve the project
you will need a ton of dynamite and a detonator
attach all around the robot and trigger it
it walk like my grand mother
This is amazing, well done.
Nice design. Did you make all metal part yourself? It looks very complex.
Cool. I'm building a 2 legged walking robot on my channel check it out and let me know what you think. Thanks.