Steve Brunton
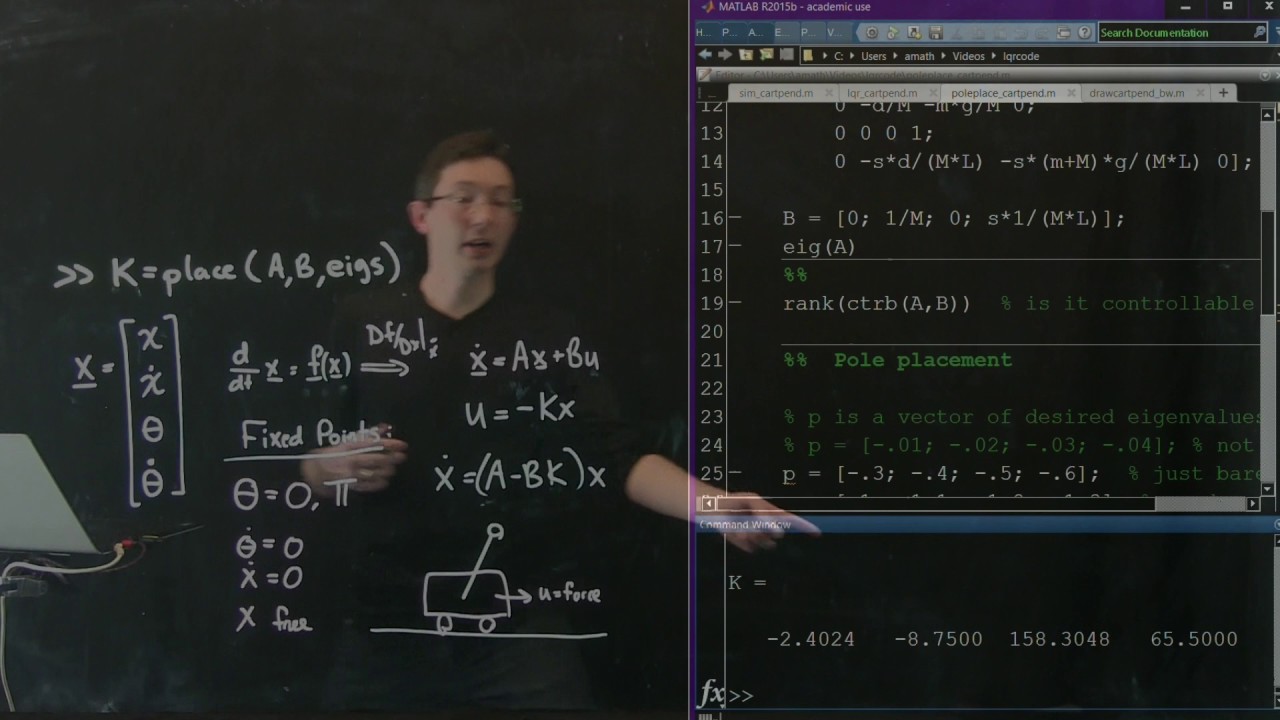
Here we use the ‘place’ command in Matlab to design full-state feedback gains to specify the eigenvalues of the closed-loop system. This is demonstrated on the inverted pendulum on a cart.
Code available at: faculty.washington.edu/sbrunton/control_bootcamp_code.zip
These lectures follow Chapters 1 & 3 from:
Machine learning control, by Duriez, Brunton, & Noack
https://www.amazon.com/Machine-Learning-Control-Turbulence-Applications-ebook/dp/B01MDUPONF/
Chapters available at: http://faculty.washington.edu/sbrunton/mlcbook/
Source