Kexin Guo
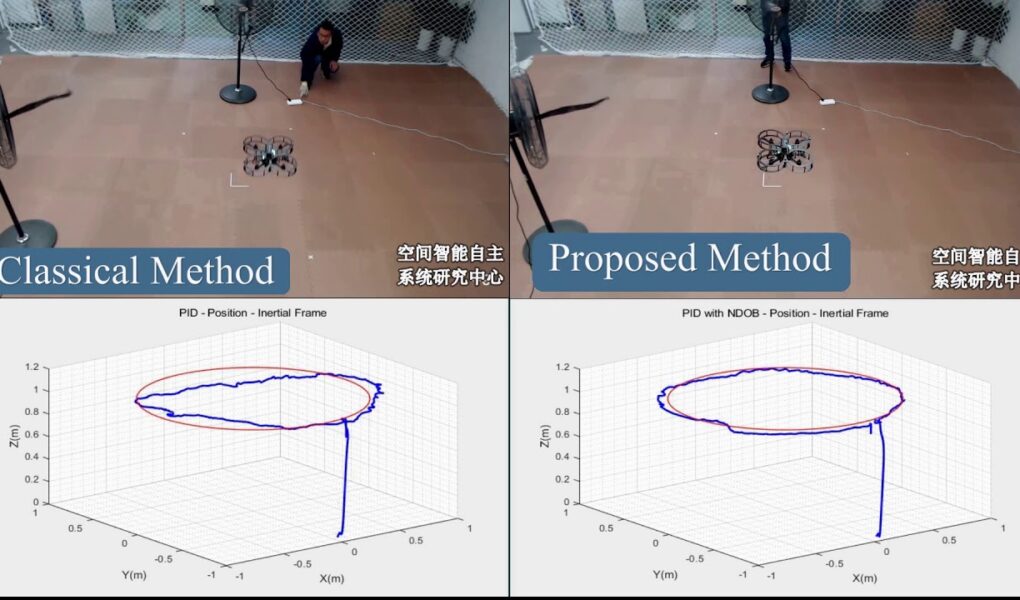
This video presents an embedded micro loop to enhance the anti-disturbance performance for unmanned aerial vehicle (UAV). Two NDOs are designed in translation loop and stabilization loop, respectively, to estimate their corresponding disturbances. Experimental results in the presence of wind disturbance, motors’ faults, and hybrid disturbances illustrate the robustness and effectiveness of the proposed method when comparing to the classical method.
Paper is available at: https://ieeexplore.ieee.org/abstract/document/8997330
Source
Dual-Disturbance Observers-based Control of UAV Subject to Internal and External Disturbances

Hello, i need simulation of this project in 24hours ,please help me 🙏