Antoni Rosinol
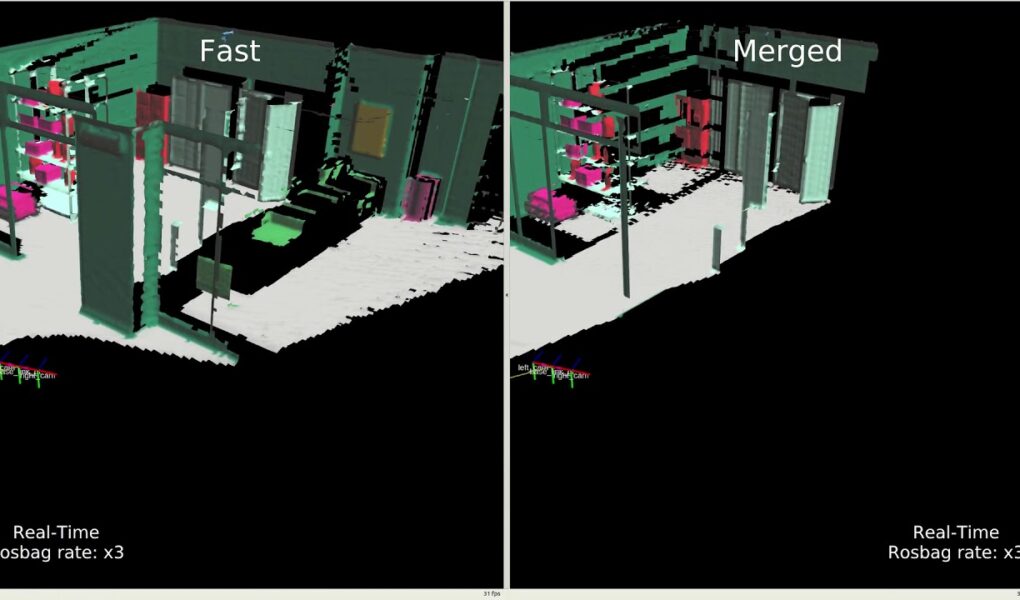
New updates for Kimera-Semantics! Now using Voxblox’ `fast` approach which is 10x faster than the `merged` approach with minor loss in accuracy particularly for small voxels: check it out https://github.com/MIT-SPARK/Kimera-Semantics
Kimera-Semantics is one of the modules of Kimera, which provides Simultaneous Localization and Geometric/Semantic Mapping using Cameras and Inertial sensors (IMU) that allows robots to locate themselves while mapping (and annotating) the world around them.
Check it out as well here: https://github.com/MIT-SPARK/Kimera
Happy coding!
Kimera Paper: https://arxiv.org/pdf/1910.02490.pdf
Kimera Video: https://www.youtube.com/watch?v=-5XxXRABXJs
Kimera Code: https://github.com/MIT-SPARK/Kimera