Boston Dynamics
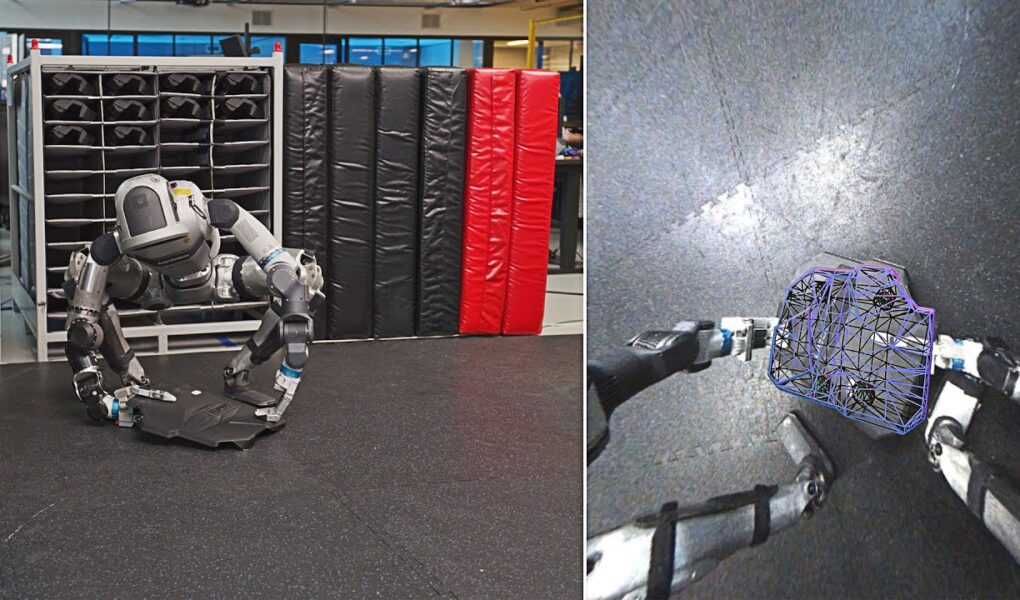
For a humanoid robot to be successful and generalizable in a factory, warehouse, or even at home requires a comprehensive understanding of the world around it—both the shape and the context of the objects and environments the robot interacts with. To do those tasks with agility and adaptability, Atlas needs an equally agile and adaptable perception system.
Learn more: https://bostondynamics.com/blog/making-atlas-see-the-world/
Source



Problem i always have with humanoid robots is that companies have no idea what their market is. You see them stocking shelves or moving boxes. We are at a weird intermediate point on automation right now, but the future of factories will be much more modular. Im sorry but a factory designed for a certain movement method and a very basic robot with wheels designed specifically for that mission will always beat a humanoid. Humanoid robots primarily make sense in areas like hooking up hoses, cabling, doing stuff like remote repairs/factory debugging, or building on rough terrain. They may seem like the best way right now, but they do everything and are specialized at nothing. A basic bot that is specialized would have like 20x throughput which will just demolish you in the market just a couple years after being integrated (you fit now but you wont soon).
The older model was better.
Why do you limit the machine by human limitations? Example: Why spinning the head instead of having sensors all around it?
Kudos for Boston Dynamics showing how robotics engineering is really done, as opposed to smoke and mirrors car salesman conman Elon Musk and their "Tesla Bots"…
I need your clothes, your boots and your motorcycle
So that's why my packages are caved in…
It picks things up just like a 2 year old would
Why not have a second atlas to shift things around and add a bit of chaos
The more you watch these robots the more you realise just how incredible humans are. Everything we take for granted took an unfathomable amount of design. God really is the greatest creator.😊
this is a better use for plastic engine covers than their intended function
Amazing. In 20 years we will have one at home. I'm saving already. I woudnt expect to see it.
What happens if you give this robot a neural network so it could learn stuff without the need of us programing it and that's ofcourse by putting that neural network in a computer that simulates the robot movements in a program and when the robot learns stuff there you put that neural network in the irl robot basically the computer is it's school and what it learns in the computer it does irl that's to avoid programing and stuff
How hard would it be to just connect & simulcast a mocap suit to one of these and just store movement data sets by your own body?
Should be easier than this, no?
he looks like a 4 yo
Thought about stabilizing the camera separate from the body to make the video easier to process? The feet seems to make the camera move a lot. Is this all computer vision?
If you guys are "coding" these, then you will never be able to catch up to Tesla…
Humans have an amazing amount of calculating capacity. We calculate numbers in how far to move our fingers, and how to tap the phone, and how to spell a word to communicate with you here. You under sell the human brain.
who needs to walk when you can dance.
XD Ich finde gut wie er die Teile ins fach rein boxt
animatrix second renaissance anyone? ^^
I bet 360 deg cameras will be in the near future to avoid the head turn completely and adapt to changes in fixture location on the fly.
U dont move a bipedal robot to move things 10'… rollers do that perfectly well for a fraction of the price…
Did you guys do something scary again?
Yeah…. You did….
those footsteps are *loud*. that can't be great lol – would love if you could add a negative reward for high foot velocity on ground impact later in training or something
something like that so it sounds more fluid when getting around
Can y'all please stop? Have you not seen any sci-fi movies of the last 50 years?
Maybe let's not teach him to punch? Wise?
I have a question. A few years ago, Corridor Digital did a great spoof of an Atlas robot being put through hell by humans ( I can't be alone in thinking " Leave the poor thing alone! " every time a robo-pack horse was kicked in real life ). But they also showed the VFX robot being harassed by a loud horn. I thought "Er,. but these thing are deaf, surely." Jump foreword, and here we have not only a reaction to the sound of a falling object, but pin-point location of the source. Why haven't Boston Dynamics boasted of the robot's 3D hearing? At the risk of sounding cynical, might that moment have been scipted? It also moved to the far side of object, so that it faced the camera, as if to 'demonstrate' it's technique for picking things up from the ground.
Why doesn't the robot grab 2 objects to move? It handles an object with a single hand… 🤔😶
how program it to pick up TWO things 😀 It's kinda cute
What if put such robot into space with walls painted by 3d-pictures of rooms? Will he recognize that its just 2d pictures or will crash himself by trying to move inside?
Amazing! I don't think though that the performance of the robot is enhanced by it's clunky steps, when a simple fix like shock absorbing soles similar to trainers would improve function and probably its grip
Next video….Atlas approaches office manager and asks for a raise.
1:58 Loader Bot
Aint sneaking up on anyone at least
01:03 > With the "Fist" 😀
Robot: searching for solution : Int {E = mc²} . output = { print ("use Faust !.")
break } 😀 😀 😀 😀
Ok, very good, but i prefer when dancing😅!
We as humans are falling behind with our lack of 360 degrees head turning. Imagine how useful it would be lol
As a human I enjoy watching something act as we do, I would like to make it my pet.
That boy has a hella of delay before it starts moving again soon or or later they going be whipping are asses still trying to invest in this company