Resilient Cyber-Physical Systems Lab
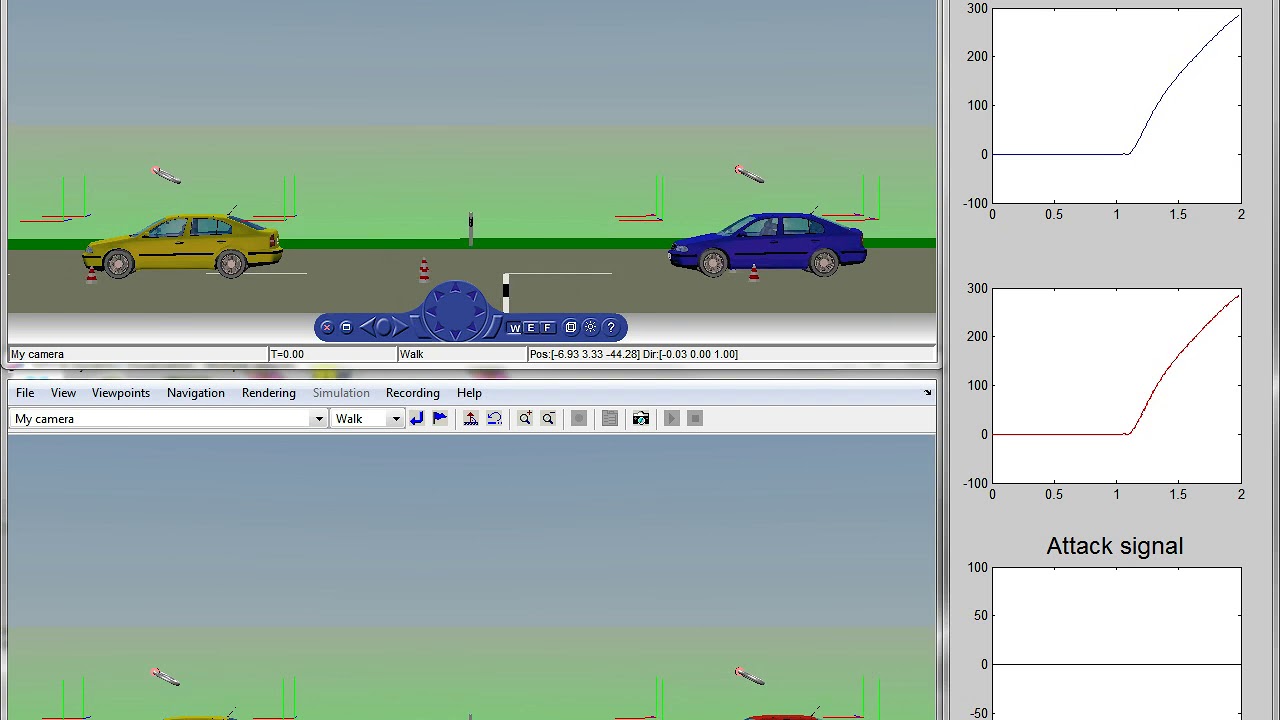
This video shows the results of our papers titled “Secure state estimation under sensor attacks: A Satisfiability Modulo Theory approach” and “Secure State Reconstruction in Differentially Flat Systems under Sensor Attacks Using Satisfiability Modulo Theory Solving”. These papers focus on scenarios where measurements from various sensors are sent to a central unit to be fused together to detect and isolate malicious sensors. Once the malicious sensors are detected and isolated, one can estimate the state of the underlying physical system by using the data collected from the attack-free sensors. This technique is referred to as “secure state estimation.” In this video, we simulate an active cruise control scenario in which the velocity measurements is under attack. Both red and blue cars are following the yellow car while maintaining a safe distance. The blue car is running our secure state estimator to filter out the attack signal and correctly estimate the car velocity. The red car estimates the velocity directly from the sensor measurements. As a consequence, when the attack strength increases, the error in state estimation increases forcing the red car to crash into the yellow one.
Source
Secure State Estimation using Satisfiability Modulo Convex Optimization (cruise control)