Franky De Bruyne
State-observer design
Disturbance observer: 00:00
Inverted pendulum and Coulomb friction: 01:46
Disturbance models: 06:21
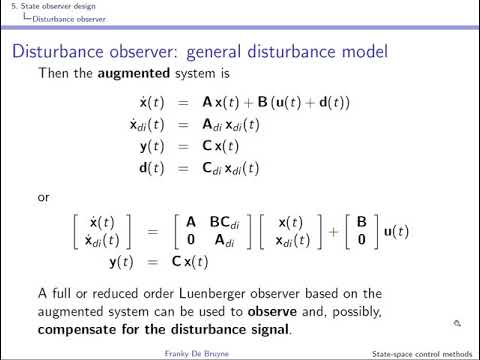
General disturbance model: 07:11
Constant disturbance model: 09:30
Optimal state estimation: 10:56
Model assumptions: 10:56
Covariance: 12:54
Kalman filter: 16:07
Discrete-time design: 23:29
Discrete-time model: 24:38
State-estimation: 25:43
Observer-based control: 27:21
Reduced order observer: 27:43
Disturbance observer (constant disturbance model): 29:38
Matlab:
Pole placement and Luenberger estimator design: 31:35
LQR and Kalman filter: 38:12
Source

Hi Sir,
In case of Output Disturbance, How can we change the matrix [A, BC_di; 0, A_di] at 8:06
Could you please make video for h infinity state observer?
Very informative video,I rather have a question and a remark:
1- Whenever we want to estimate an external disturbance is it mandatory to consider an agumented system that comprises besides the orginal state variables the disturbance we want to estimate right.?
2- I wonder if the coulombic friction you stated is having opposite direction as xdot.According to this, it is likely that the acting force of coulombic friction is going to be Fc = – |Fc|*sign(xdot) rather than |Fc|*sign(xdot).
Dear Franky De Bruyne
Thank you so much for the helpful video. However, I am very curious how to determine A_di matrix. For example if I have d = [d1 d2]^T, is it possible to use identity matrix as A_di matrix?
Furthermore, if I would like to estimate all disturbances, can I use identity matrix as C_di matrix as well?
Please correct me if I have incorrect understanding about this material.