Steve Brunton
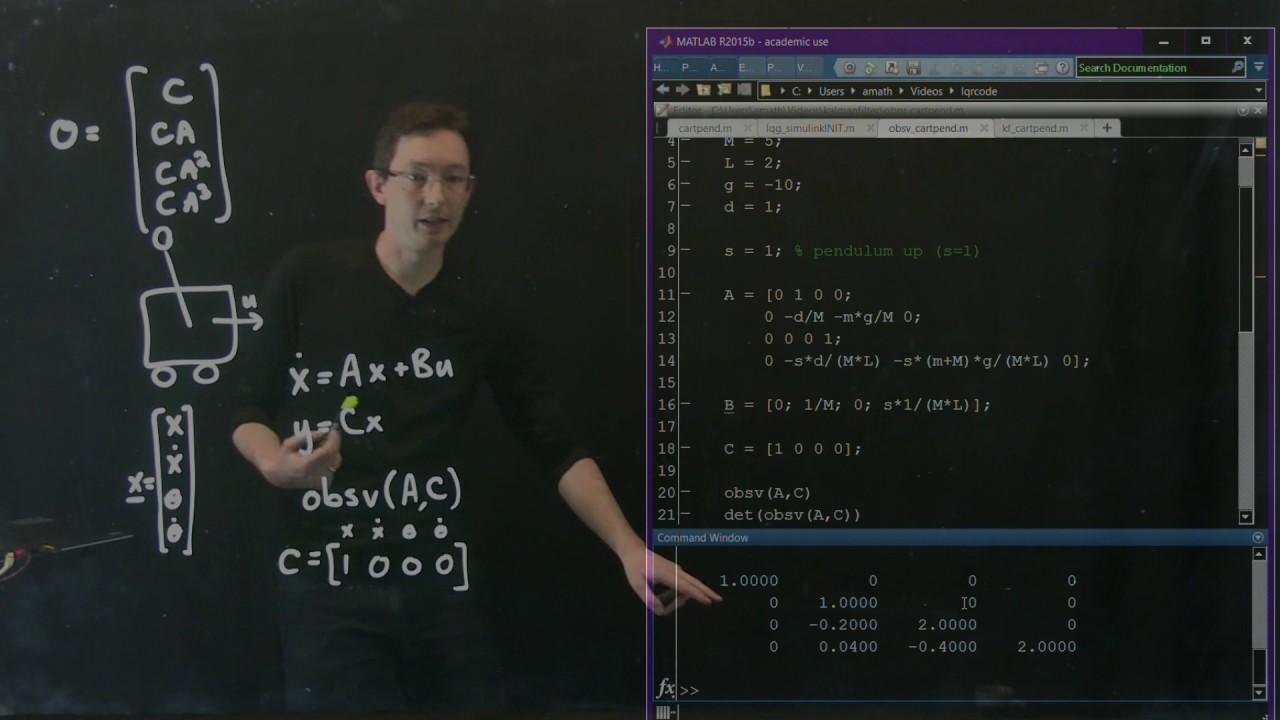
This video explores observability in Matlab on the example system of an inverted pendulum on a cart.
Code available at: faculty.washington.edu/sbrunton/control_bootcamp_code.zip
These lectures follow Chapters 1 & 3 from:
Machine learning control, by Duriez, Brunton, & Noack
https://www.amazon.com/Machine-Learning-Control-Turbulence-Applications-ebook/dp/B01MDUPONF/
Chapters available at: http://faculty.washington.edu/sbrunton/mlcbook/
Source


Thanks for your lessons Mr. Brunton! The explanations about controllability/observability are helping me a lot to understand the magic behind the state estimation hahaha
Can I evaluate the observability of a nonlinear system without linearize it?
will you be covering the digital control at all? love your teachings
Watching one video after another and quiting full-screen mode just to hit the like button. Learning from You is pleasure!
Since position x is a free variable, we cannot get information on x if we measure only the angle theta. However, intuitively why is it that if we only measure x can we get information on the other variables? In other words, why is it that we have only a one way street?
What if we want to measure more than one state variable ? How is the C matrix going to be affected ? Because if you have more than one 1 in the C matrix, you're going to end up adding the state variables…
Thanks a lot for the videos !!
You are great teacher. I take advantage of all of your control videos. Thanks a lot.
full state estimation really requires to check the observability matrix, cool!