ASU Robotics and Intelligent Systems Lab
This work was presented in 2017 American Control Conference. doi: 10.23919/ACC.2017.7963503
Source
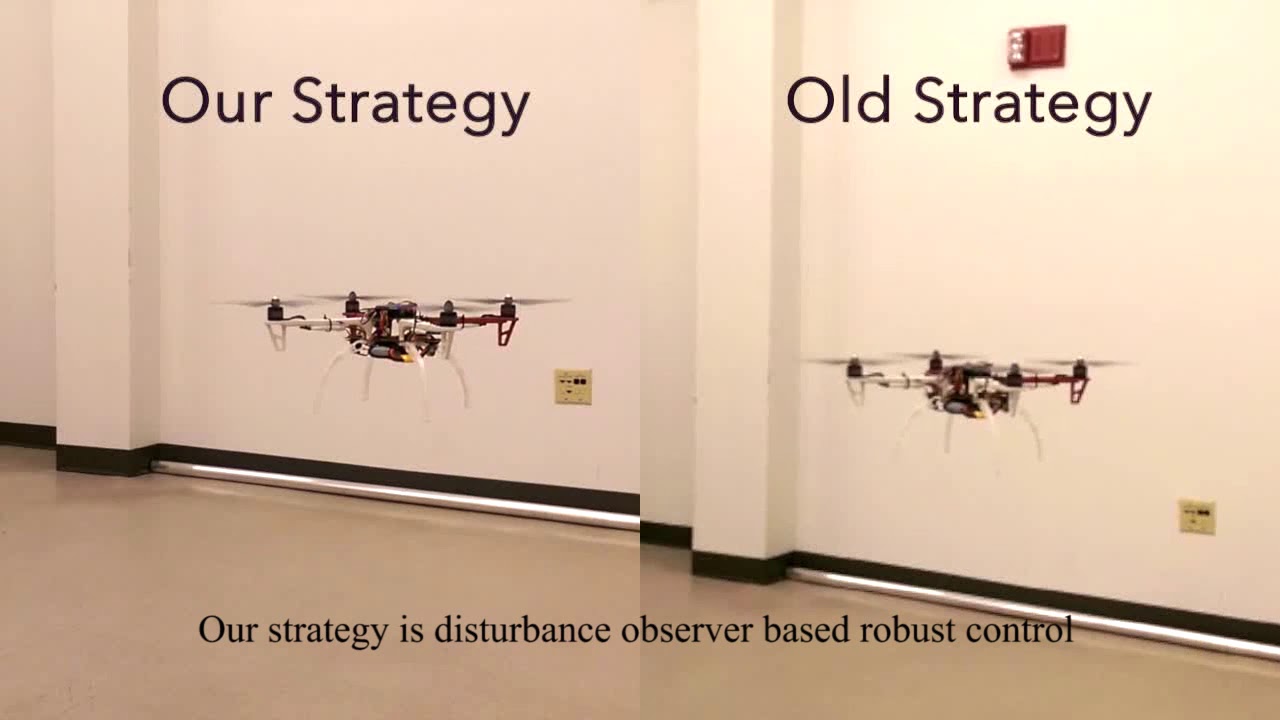
robust position control of a quadcopter based on a disturbance observer
ASU Robotics and Intelligent Systems Lab
This work was presented in 2017 American Control Conference. doi: 10.23919/ACC.2017.7963503
Source
Comments are closed.


hi i need help with this please 🙏