MATLAB
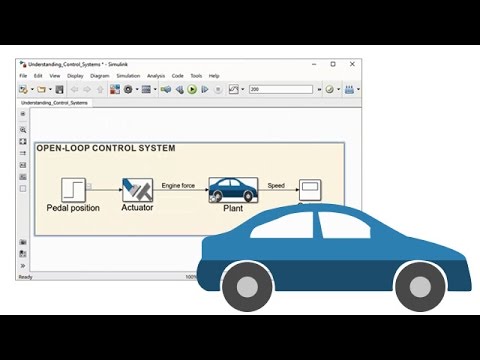
This demonstration uses a car to show how you can simulate open- and closed-loop systems in Simulink®.
Download model: http://bit.ly/2Qau7XO
Watch other MATLAB Tech Talks: https://goo.gl/jD0uOH
Get a free Product Trial: https://goo.gl/C2Y9A5
First, you will learn how to model and tune open-loop systems. The goal of the demonstration is to maintain the speed of a car. Then, you’ll explore the behavior of the open-loop system in the presence of a disturbance. To illustrate disturbance rejection, the video shows how to model and simulate a feedback control system . You will gain insight into how feedback control compensates for disturbance. You’ll investigate signals such as error (in this example, the error is the difference between the measured and desired output), actuating signal (here, the actuating signal is the pedal’s position) and system output (in this example, the output is speed).
Source
Understanding Control Systems, Part 4: Simulating Disturbance Rejection in Simulink


"ok not like that"
.
.
i think engineer cant take a joke.
Download the model used in this video here: https://www.mathworks.com/matlabcentral/fileexchange/69001-simulating-disturbance-rejection-in-simulink
Very useful video.
how do i add disturbances to my code?
T = Feedback(R(s)*G(s),1)
step(T)
madam, is it possible to analyse the wear and thermal on brake pad?? if so please help me
so what's in it for the viewer if you use custom functions :
brilliant, just brilliant…
can we simulate with two different lanes to avoid collision of vehicle at intersection
Wonderfull, i'm waiting for the next one! amazing video, amazing explanation!
great video ! and …how could someone move the mouse so fast!!!!!!!!!!!!
Did you use the PID tuner application to develop the Controller?
Pretty good demonstration! Thanks a lot, I'm waiting for the next video.
Great video, keep up the good work. i'll be waiting for the next videos 🙂