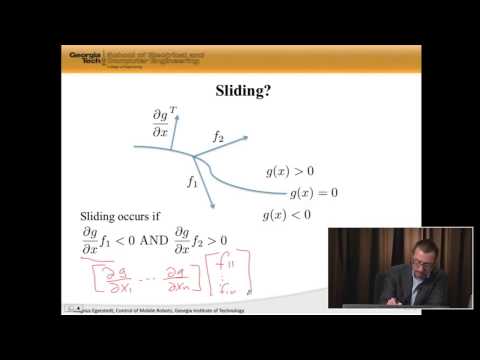
The explanation is incomplete and incorrect in some places. (1) If the two structures f1 and f2 are such that at the sliding surface f1=-f2, then the system does ground to a halt. In addition to the condition of L_f1 g * L_f2 g < 0, we would also need f1 not being -f2.
(2) Mere existence of an attractive surface does not mean sliding mode. In fact, the primary condition is the design of a surface and then selection of appropriate manipulations to tune f_1 and f_2 (which is called as sliding mode control)
The lecture may be a good one in nonlinear dynamics. But, it is certainly a misleading introduction to sliding mode.
dear sir am working on 2DOF flexible link arm manipulator control using sliding mode but am not having resources to study it please suggest me some sources so that i can implement sliding mode control on my project
Magnus Egerstedt is so smart … He is so clever in explaining things … I attended a lecture for him in Singapore about internet of things … he was amazing …
Please can i ask you for the thing that you use it for volatillity the pages of microsoft powerpoint? I buy the same thing but i don't khnow how to use it!! Please answer me in the nearest time!
i think that is the perfect control method, but it have the problem of the chattering
well done, thank you very much
how to implement smc with pso
Very nice lecture.. interested in more lectures? https://youtu.be/urFRAqAMV3w
The explanation is incomplete and incorrect in some places.
(1) If the two structures f1 and f2 are such that at the sliding surface f1=-f2, then the system does ground to a halt. In addition to the condition of L_f1 g * L_f2 g < 0, we would also need f1 not being -f2.
(2) Mere existence of an attractive surface does not mean sliding mode. In fact, the primary condition is the design of a surface and then selection of appropriate manipulations to tune f_1 and f_2 (which is called as sliding mode control)
The lecture may be a good one in nonlinear dynamics. But, it is certainly a misleading introduction to sliding mode.
For basixs of sliding mode.
https://youtu.be/x9WxwM6Ebvo
dear sir
am working on 2DOF flexible link arm manipulator control using sliding mode but am not having resources to study it
please suggest me some sources so that i can implement sliding mode control on my project
Magnus Egerstedt is so smart … He is so clever in explaining things … I attended a lecture for him in Singapore about internet of things … he was amazing …
Please can i ask you for the thing that you use it for volatillity the pages of microsoft powerpoint? I buy the same thing but i don't khnow how to use it!! Please answer me in the nearest time!
i think that is the perfect control method, but it have the problem of the chattering
thanks a lot