Steve Brunton
This video provides a brief recap of this introductory series on Physics Informed Machine Learning. We revisit the five stages of machine learning, and how physics may be incorporated into these stages. We also discuss architectures, symmetries, the digital twin, applications in engineering, and the importance of dynamical systems and controls benchmarks.
This video was produced at the University of Washington, and we acknowledge funding support from the Boeing Company
%%% CHAPTERS %%%
00:00 Intro
00:24 Future Modules
06:06 Curriculum Framework
07:02 The Dual Problems of PIML
08:45 Data-Driven Science and Engineering
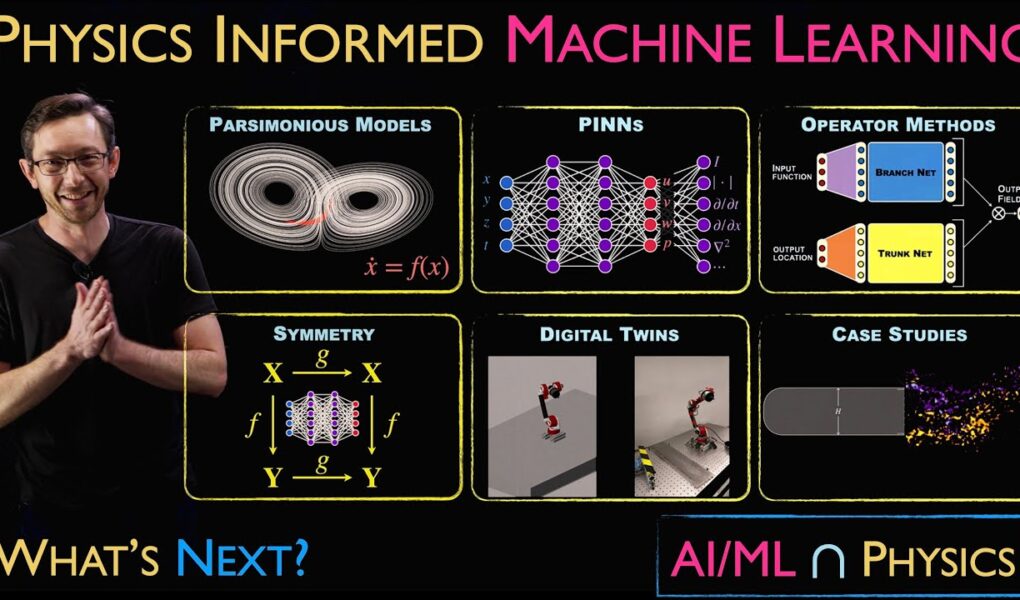
09:12 Sneak Peak of the Modules
09:35 Sneak Peak: Parsimonious Models
11:13 Sneak Peak: PINNs
12:47 Sneak Peak: Operator Methods
14:10 Sneak Peak: Symmetries
15:42 Sneak Peak: Digital Twins
17:35 Sneak Peak: Case Studies & Benchmarks
18:24 Outro
Source

great stuff
I wonder what is the future of the mechanical engineer in the presence of machine learning and artificial intelligence?? ❤❤
This is so good that I can't believe that we can get this type of knowledge for free!
Nice flow, and awesome explanation, thank you.
shoutout operator learning man so inspirational
great video thank you steve bry the ml guy
Well done. Thank you
Hi Steve, I'm reading your book data sciense. The book is very good. I love it, your videos is very amazing. You are so amazing. Saludos de México 🙏🇲🇽
You know that you are watching a Steve Brunton video when it starts with 'welcome back' and finishes with 'thank you'
i realy enjoyed machine learning for physics and we want more videos for it we believe its not the last one actually we want more on this topic
Please don't ever stop educating
An idea is emerging from these inspiring videos: the ML community is a dynamical system "per se", that is exploring and exploiting the space of domains and solutions to minimize their loss. I would ask to myself: "wich is my gradient?" . Tks Steve !
dr brunton, you saved my ass when I was a CS student who was thrown into an industrial robotics position and had no clue about physics/mechanics. thanks for all your videos!
You say you use a custom optimization algorithm for a specific term in the loss function, but then doesn’t that only optimize for that one term so that the parameters that optimize it, when found with the custom algorithm, may not optimize the other terms and you are just finding something “Pareto optimal” when you can tradeoff the loss terms, when we want the minimum of the sum of loss terms? How do we then optimize the full sum if this custom algorithm only optimizes one term? It’s not clear from these first videos alone, but I probably should just read the referenced papers and it will be obvious!