Antonio Franchi at LAAS-CNRS – RIS team
Paper: Staub N, Mohammadi M, Bicego D, Prattichizzo D, Franchi A. Towards Robotic MAGMaS: Multiple Aerial-Ground Manipulator Systems. In: 2017 IEEE Int. Conf. on Robotics and Automation. 2017 IEEE Int. Conf. on Robotics and Automation. Singapore; 2017.
Link: http://homepages.laas.fr/afranchi/robotics/?q=node/410
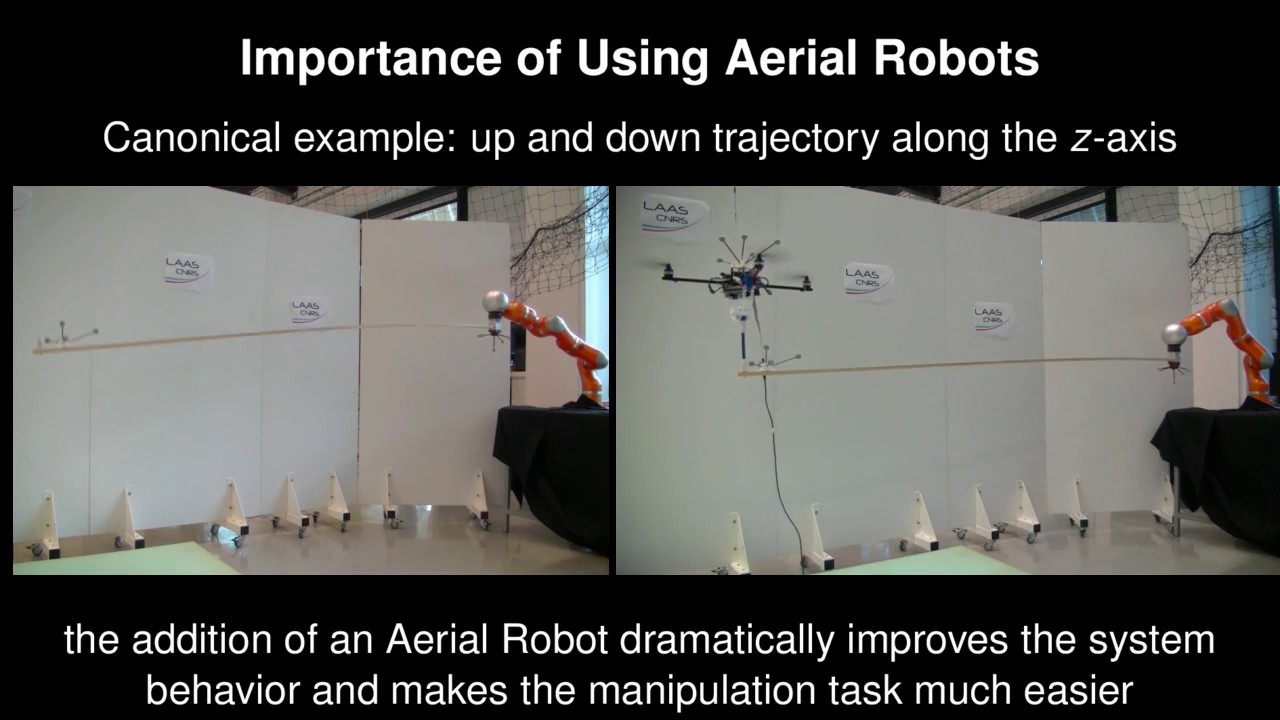
Abstract: In this paper we lay the foundation of the first heterogeneous multi-robot system of the Multiple Aerial-Ground Manipulator System (MAGMaS) type. A MAGMaS consists of a ground manipulator and a team of aerial robots equipped with a simple gripper manipulator the same object. The idea is to benefit from the advantages of both kinds of platforms, i.e., physical strength versus large workspace. The dynamic model of such robotic systems is derived, and R Ro its characteristic structure exhibited. Based on the dynamical i structure of the system a nonlinear control scheme, augmented with a disturbance observer is proposed to perform trajectory tracking tasks in presence of model inaccuracies and external disturbances. The system redundancy is exploited by solving an optimal force/torque allocation problem that takes into account the heterogeneous system constraints and maximizes the force manipulability ellipsoid. Simulation results validated the proposed control scheme for this novel heterogeneous robotic system. We finally present a prototypical mechanical design and preliminary experimental evaluation of a MAGMaS composed by a kuka LWR4 and quadrotor based aerial robot.
Source